Cockpit은 웹 기반의 리눅스 서버 GUI 도구 플랫폼입니다. 보통 ssh로 접속하여, 이것저것 터미널 명령어를 이용해서 설정 및 사용도 가능하지만, Cockpit을 사용하면 웹 기반의 GUI 환경에서 작업이 가능합니다.
설치도 매우 간단합니다. Ubuntu에서도 쉽게 apt를 이용해서 설치가 가능합니다.
$ sudo apt install cockpit실행은 따로 할 필요없이, 자동으로 서비스로 등록되어 부팅 후에 자동 실행됩니다. 기본포트는 9090으로 설치후 https://localhost:9090으로 접속하면 다음과 같은 화면을 보실 수 있습니다.
크롬 등 브라우져에서 비보안접속 경고가 떠도 일단은 그냥 접속진행하셔도 무방합니다. 로그인은 현재 PC의 사용자 계정으로 접속하면 됩니다.
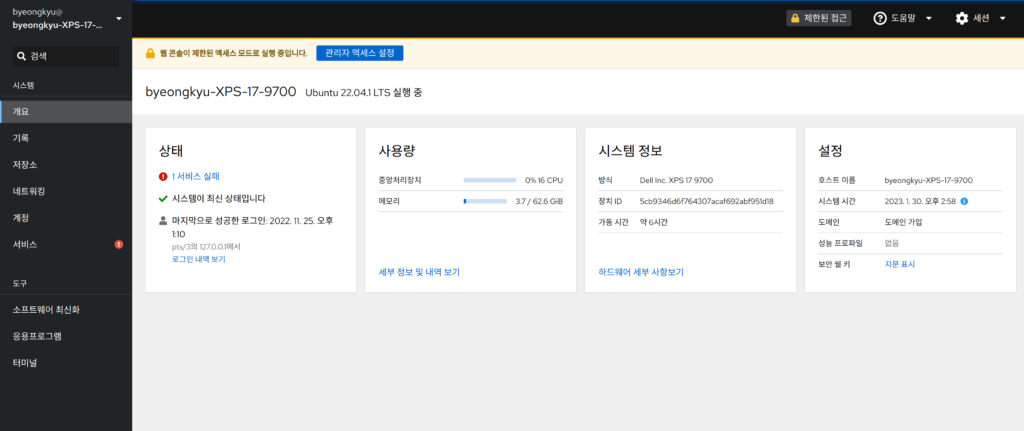
이제 좌측 메뉴에서 기본적으로 제공되는 정보를 이용해 PC 모니터링이 가능합니다. 터미널 실행도 가능합니다.
좌측의 도구는 사용자가 직접 개발하여 추가도 가능합니다.
사실 Cockpit에 관심을 가지게 된 이유가, 로봇의 파라미터 설정, 모니터링 및 유지보수가 목적이었는데, 사용자 도구를 이용하여, ROS의 rviz 등을 표시해서 간단한 제어 및 모니터링 기능을 추가해보는 것도 괜찮을듯 합니다.
Leave a Reply